從倉(cāng)庫(kù)地面到立庫(kù)貨架��,物流行業(yè)不斷內(nèi)卷�,如今靈活高速����、自由變換方向地行駛在密集型貨架上的四向穿梭車,已在諸多行業(yè)的自動(dòng)化立庫(kù)中落入現(xiàn)實(shí)�����。靈活高速�����、自由變換方向地穿梭于密集型貨架上的物流機(jī)器人是人們對(duì)于智能倉(cāng)儲(chǔ)的想象之一�����,如今已在諸多行業(yè)的自動(dòng)化立庫(kù)中落入現(xiàn)實(shí)���。
隨著市場(chǎng)競(jìng)爭(zhēng)的加劇���、土地和人力等成本壓力的攀升,企業(yè)對(duì)于自動(dòng)化立庫(kù)的建設(shè)需求逐年增加���,其市場(chǎng)規(guī)模也不斷擴(kuò)大���。在這場(chǎng)倉(cāng)儲(chǔ)物流改造升級(jí)的熱潮中���,口袋深的大企業(yè)希望作業(yè)效率能再提高,口袋淺的小企業(yè)希望投資能更具性價(jià)比�����,壓力的天平傾斜到智能物流裝備廠商這邊�,在自動(dòng)化立庫(kù)解決方案上掀起了一場(chǎng)曠日持久的“內(nèi)卷”之爭(zhēng):
1、“卷”環(huán)境適應(yīng)性��?堆垛機(jī)立庫(kù)適用較高��、較長(zhǎng)�����、布局較規(guī)整的倉(cāng)庫(kù)環(huán)境���,當(dāng)倉(cāng)庫(kù)高度不足、形狀不規(guī)則時(shí)��,傳統(tǒng)堆垛機(jī)立庫(kù)就顯得力不從心��。如何為企業(yè)提供更具環(huán)境適應(yīng)性的自動(dòng)化立庫(kù)解決方案�����?
2、 “卷”空間利用率���?倉(cāng)庫(kù)空間有限���,自動(dòng)化立庫(kù)建設(shè)過(guò)程中,如何合理規(guī)劃貨位����,同時(shí)確保后期擴(kuò)展的便利性?這成了令許多廠商頭疼的問(wèn)題�����。
3����、“卷”預(yù)算靈活度?對(duì)于許多中小企業(yè)而言��,堆垛機(jī)立庫(kù)的高建設(shè)成本是一個(gè)不小的負(fù)擔(dān)�。如何在預(yù)算有限的情況下幫助企業(yè)實(shí)現(xiàn)倉(cāng)儲(chǔ)自動(dòng)化升級(jí)?
4�、“卷”作業(yè)效率�����?企業(yè)作業(yè)量波動(dòng)大��,如何在波峰時(shí)期提升作業(yè)效率���,同時(shí)在波谷時(shí)期減少資源浪費(fèi)?這成了廠商追求解決方案持續(xù)優(yōu)化的關(guān)鍵�����。
面對(duì)這一系列問(wèn)題��,智能物流裝備廠商“卷”出了一個(gè)適應(yīng)性更強(qiáng)����、柔性化程度更高且更具成本優(yōu)勢(shì)的“新寵”,那就是四向穿梭車自動(dòng)化立庫(kù)��。
")
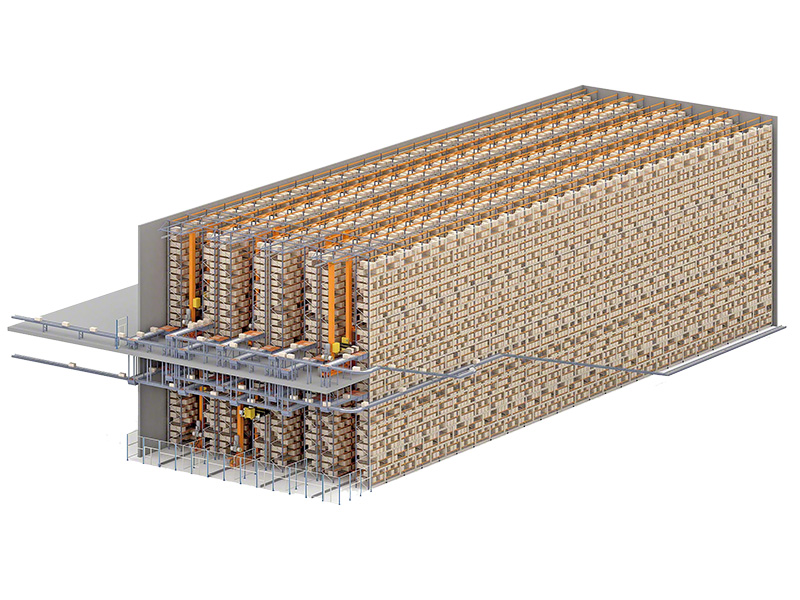
四向穿梭車作為近些年來(lái)興起的物流新設(shè)備���,其設(shè)計(jì)概念來(lái)源于穿梭板和子母車,是一種應(yīng)用于自動(dòng)化立體倉(cāng)庫(kù)系統(tǒng)中�,由軌道導(dǎo)引并且可以自動(dòng)變軌換向的智能物流搬運(yùn)設(shè)備�����。它根據(jù)作業(yè)指令的要求����,在換層提升機(jī)的協(xié)助下���,通過(guò)行駛軌道完成在多層貨架貨位的貨物存取等任務(wù)����,從而實(shí)現(xiàn)貨物的快速出入庫(kù)和庫(kù)存管理����。相較于傳統(tǒng)的堆垛機(jī)立庫(kù),四向穿梭車立庫(kù)對(duì)于倉(cāng)庫(kù)高度����、形狀等條件的要求沒(méi)有那么嚴(yán)格,建設(shè)與維護(hù)成本相對(duì)較低�,且具有高效、靈活���、柔性的作業(yè)特點(diǎn)���,因而應(yīng)用漸廣���。
通常來(lái)說(shuō),四向車穿梭車與貨架����、換層提升機(jī)、軌道輸送線以及軟件系統(tǒng)等共同構(gòu)成了四向穿梭車自動(dòng)化立體倉(cāng)庫(kù)系統(tǒng)��。同時(shí)����,根據(jù)不同的作業(yè)處理形式,四向穿梭車大致分為托盤(重載)四向穿梭車和箱式(輕型)四向穿梭車兩類��。其中�����,前者主要面向托盤載具貨物的密集存儲(chǔ)領(lǐng)域��,而后者則被較多地應(yīng)用于箱式載具貨物的“貨到人”揀選場(chǎng)景�����。
托盤(重載)四向穿梭車,主要構(gòu)建以托盤為存儲(chǔ)單位的自動(dòng)化立體倉(cāng)庫(kù)����,進(jìn)行重達(dá)幾百公斤乃至是一噸以上的托盤貨物存取作業(yè)�。它可與上位機(jī)或WMS等系統(tǒng)進(jìn)行通訊,結(jié)合條碼識(shí)別等物流信息技術(shù)�,完成貨物的存取、搬運(yùn)作業(yè)���,可以較為容易地實(shí)現(xiàn)密集存儲(chǔ)�����,但對(duì)貨架的性能要求比較高�,從而在一定程度上增加了貨架成本�����。
箱式(輕型)四向穿梭車��,主要構(gòu)建以輕型料箱�、紙箱等為存儲(chǔ)單位的自動(dòng)化立體倉(cāng)庫(kù)。除密集存儲(chǔ)場(chǎng)景外,它還可承載線邊庫(kù)重量達(dá)幾十公斤的箱式貨物的高速揀選作業(yè)�,可有效完成多品種、多規(guī)格���、多存儲(chǔ)貨物的自動(dòng)化存儲(chǔ)及拆零揀選作業(yè)�。
")
四向穿梭車更具性價(jià)比
由于四向穿梭車的作業(yè)路徑可以覆蓋倉(cāng)庫(kù)內(nèi)的任何貨位��,從理論上來(lái)講����,當(dāng)企業(yè)出入庫(kù)頻率較低時(shí),一個(gè)倉(cāng)庫(kù)布置一臺(tái)四向穿梭車��,再配合貨架�����、換層提升機(jī)��、軌道輸送線以及軟件系統(tǒng)等�����,即可完成整個(gè)倉(cāng)庫(kù)作業(yè)��;當(dāng)企業(yè)出入庫(kù)頻率升高時(shí),則可增加四向穿梭車的數(shù)量以完成大量作業(yè)任務(wù)���。因此��,四向穿梭車的出現(xiàn)及應(yīng)用�,革新了傳統(tǒng)的自動(dòng)化立體倉(cāng)庫(kù)作業(yè)模式����,極大提升了倉(cāng)庫(kù)的存儲(chǔ)作業(yè)效率與柔性��,具有以下特點(diǎn)與優(yōu)勢(shì):
1�����、高效率:與傳統(tǒng)立體倉(cāng)庫(kù)中堆垛機(jī)的單機(jī)作業(yè)模式相比���,四向穿梭車一般為多設(shè)備聯(lián)動(dòng)作業(yè)�,且具備較高的速度運(yùn)行能力�、精準(zhǔn)的定位能力和智能化的調(diào)度能力,因而作業(yè)效率較高�。2、高柔性:四向穿梭車由于具備前��、后、左�����、右四個(gè)方向的行駛能力�,在作業(yè)時(shí)更加高效靈活。同時(shí)��,與堆垛機(jī)立體倉(cāng)庫(kù)對(duì)倉(cāng)儲(chǔ)布局的規(guī)整度���、高度要求相比�����,四向穿梭車系統(tǒng)可適用于倉(cāng)庫(kù)高度較低����、異形建筑等不規(guī)整布局環(huán)境����,并通過(guò)增加或減少四向穿梭車和換層提升機(jī)的配置數(shù)量,來(lái)滿足不同客戶在具體的倉(cāng)庫(kù)面積��、物流倉(cāng)儲(chǔ)成本��、訂單吞吐量等方面的不同需求,具有較高柔性����。
3、高密度:由于四向穿梭車的車身較薄�����、體積小���、作業(yè)寬度窄,可在狹小的通道中自由行駛���,實(shí)現(xiàn)在任意方向的存取操作�,并無(wú)需額外的轉(zhuǎn)彎空間�,適用自動(dòng)密集型高層貨架,可顯著提高庫(kù)位數(shù)量與倉(cāng)儲(chǔ)空間利用率高�,因而具有較高的存儲(chǔ)密度。
4����、高性價(jià)比:傳統(tǒng)的堆垛機(jī)自動(dòng)化立體倉(cāng)庫(kù)搭建成本較高,庫(kù)位數(shù)量較少����,單個(gè)貨位平均成本較高�;四向穿梭車相對(duì)堆垛機(jī)而言價(jià)格較低�����,雖然貨架密度更大�����、成本更高��,但單個(gè)貨位平均成本具有優(yōu)勢(shì)���。高工咨詢研究數(shù)據(jù)顯示���,與傳統(tǒng)的堆垛機(jī)立體倉(cāng)庫(kù)相比,四向穿梭車立體倉(cāng)庫(kù)空間利用率可提高 20%以上�����,同時(shí)作業(yè)效率可提高20%��,運(yùn)行能耗可降低30%�,單元投資成本可節(jié)約10%左右�����。
5����、可拓展性:相較于堆垛機(jī)立體倉(cāng)庫(kù)整體布局形成后難以更改的特點(diǎn)而言��,四向穿梭車系統(tǒng)可根據(jù)企業(yè)經(jīng)營(yíng)情況與發(fā)展需求����,通過(guò)增加四向穿梭車數(shù)量、擴(kuò)建貨架等形式進(jìn)行后期建設(shè)�����,因而具有較好的拓展性���。
")
相較于傳統(tǒng)的兩向(前進(jìn)和后退)穿梭車而言,四向穿梭車具有兩套輪系����,分別負(fù)責(zé)貨架上X、Y方向的行駛����,它通過(guò)更換輪系來(lái)完成軌道切換�,從而實(shí)現(xiàn)在平面內(nèi)四個(gè)方向(前��、后����、左、右)的行駛�,并通過(guò)換層提升機(jī)的協(xié)助,完成垂直方向上的換層從而實(shí)現(xiàn)三維穿梭�。其工作原理如下:
1、通過(guò)無(wú)線通訊與上位系統(tǒng)(如 WMS�、WCS、RCS 等)進(jìn)行數(shù)據(jù)交換�����,接收任務(wù)指令�����,實(shí)時(shí)反饋運(yùn)行狀態(tài)和位置信息����;
2����、根據(jù)任務(wù)指令���,輔以換層提升機(jī)的協(xié)助���,在不同層級(jí)貨架內(nèi)沿著專用軌道進(jìn)行前后左右行駛,到達(dá)目標(biāo)貨位后�,通過(guò)頂升機(jī)構(gòu)或貨叉機(jī)構(gòu)將貨物存入或取出;
3���、在完成作業(yè)任務(wù)后�����,返回到指定位置��,等待新的作業(yè)指令���。
通過(guò)解析四向穿梭車的工作原理����,我們可以發(fā)現(xiàn)�����,其關(guān)鍵技術(shù)主要包括定位技術(shù)���、控制系統(tǒng)、無(wú)線通訊技術(shù)��、調(diào)度系統(tǒng)和供電技術(shù)等���。
由于四向穿梭車在固定軌道上行駛����,雖然不需要導(dǎo)航系統(tǒng),但其作業(yè)對(duì)定位精度要求較高���,一般需要控制在3mm以內(nèi)����。當(dāng)前市面上�,四向穿梭車主流的定位方式有條碼定位、RFID定位和光電開(kāi)關(guān)定位等。條碼定位:在貨架行走軌道上布置條碼標(biāo)簽��,通過(guò)讀碼器識(shí)別碼帶上的信息�,測(cè)量對(duì)應(yīng)條碼的起始角度與終止角度,計(jì)算讀碼器與正在識(shí)別條碼的相對(duì)位置���,另加對(duì)應(yīng)條碼的偏移位置信息�,從而確定四向穿梭車的位置����。該定位方式布置簡(jiǎn)便、成本低���,但是安裝要求高且需要定期維護(hù)��。RFID定位:在貨架行走軌道上布置RFID標(biāo)簽和定位檢測(cè)點(diǎn)����,四向穿梭車通過(guò)傳感器識(shí)別定位檢測(cè)點(diǎn)���、讀取RFID芯片來(lái)確定車體的位置�。該定位方式精度較高�����,降低了系統(tǒng)控制難度�����,減輕了定位及安裝成本壓力�,具有較好的可維護(hù)性與容錯(cuò)性。光電開(kāi)關(guān)定位:該定位裝置主要由PLC����、光電傳感器和反射板組成。其原理是���,將光電傳感器安裝在四向穿梭車的底部�����,反射板設(shè)置在巷道入口處�,當(dāng)四向穿梭車行駛至巷道入口處�����,對(duì)齊反射板后�,將根據(jù)不同的反射板反饋2進(jìn)制碼給PLC控制器���,即通過(guò)光電反射組合精準(zhǔn)確定四向穿梭車的位置。與條碼定位��、RFID定位相比��,在保證定位精度的前提下��,光電開(kāi)關(guān)定位具有結(jié)構(gòu)簡(jiǎn)單���、便于實(shí)施和維護(hù)的特點(diǎn)��。
目前����,市面上四向穿梭車的控制系統(tǒng)主要可以分為PLC控制系統(tǒng)和專用集成電路板控制系統(tǒng)兩種。前者歐洲廠商應(yīng)用較多��,成本較高�����;而后者日本廠商應(yīng)用較廣�����,成本較低。國(guó)內(nèi)的四向穿梭車也主要采用了這兩種控制系統(tǒng)�����。隨著人工智能技術(shù)的飛速發(fā)展�����,四向穿梭車的控制系統(tǒng)正加速結(jié)合底層路徑自學(xué)習(xí)算法��,實(shí)現(xiàn)更為高速安全的運(yùn)行���、更為精準(zhǔn)可靠的定位。
如何在密集的貨架與多臺(tái)設(shè)備運(yùn)行的環(huán)境中實(shí)現(xiàn)實(shí)時(shí)可靠的通訊��,對(duì)于四向穿梭車系統(tǒng)的穩(wěn)定高效運(yùn)行尤為重要��。目前�,市面上的四向穿梭車主要采用Wi-Fi、Zigbee等無(wú)線通訊方式�����,上位控制器通過(guò)無(wú)線通訊模塊向四向穿梭車下達(dá)任務(wù)指令,任務(wù)指令傳遞至PLC處理后轉(zhuǎn)變成具體的控制信號(hào)��,并輸送至驅(qū)動(dòng)控制模塊���,進(jìn)而完成相應(yīng)的作業(yè)動(dòng)作�。
4���、調(diào)度系統(tǒng)
在四向穿梭車系統(tǒng)中��,普遍存在多臺(tái)小車同時(shí)作業(yè)的情況��,而調(diào)度系統(tǒng)通過(guò)對(duì)小車進(jìn)行車況識(shí)別����、小車選用��、路線規(guī)劃等作業(yè)調(diào)度任務(wù)�����,可幫助四向穿梭車系統(tǒng)提升整體運(yùn)行效率����。未來(lái)����,四向穿梭車調(diào)度系統(tǒng)會(huì)面臨更多場(chǎng)景融合�����、更多設(shè)備接入�、更復(fù)雜的全局任務(wù)��、更高效穩(wěn)定的節(jié)拍要求等現(xiàn)實(shí)挑戰(zhàn)����,將不斷結(jié)合物聯(lián)網(wǎng)、AI算法以及5G技術(shù)實(shí)現(xiàn)更強(qiáng)的自主性及邊緣計(jì)算能力��,發(fā)展更加智能化�、集群化、協(xié)同化的調(diào)度系統(tǒng)����。
目前����,市面上常見(jiàn)的四向穿梭車供電方式主要有電纜供電����、電容加滑觸線供電��、電容加電池供電等方式��。相較于電容與電池供電����,電纜與滑觸線供電的靈活性較差,且維護(hù)成本較高��,因而電容與電池的組合供電方式更為普遍�����。同時(shí)�,由于作業(yè)距離通常較遠(yuǎn),電池只能作為輔助供電��,電容則要保證一次充電后能完成至少一次的最遠(yuǎn)路徑作業(yè)���,而超級(jí)電容的發(fā)展則對(duì)此有很好的改善�����。
天智能穿梭車")
近年來(lái),四向穿梭車應(yīng)用漸廣���,國(guó)內(nèi)四向穿梭車市場(chǎng)也日漸火熱�����,各類型的入局者正持續(xù)增加��,以上海哥倫布、藍(lán)天智能��、智芯科技����、智世機(jī)器人、華章智能�、智庫(kù)智能等為代表的專業(yè)四向穿梭車廠商。該類型廠商大多數(shù)在成立之初就聚焦四向穿梭車賽道�����,具備較強(qiáng)的技術(shù)創(chuàng)新能力與豐富的行業(yè)經(jīng)驗(yàn)積累,在產(chǎn)品實(shí)力�����、客戶需求和項(xiàng)目交付等方面的綜合競(jìng)爭(zhēng)力較強(qiáng)�。
介紹")
品中心")


系我們")